汽车承载系统-在不同道路行驶证,主悬挂系统对车身的影响

文案|炎左
编辑|炎左

针对外界噪声统计特性不可知的问题对车身位姿融合算法进行改进以及对车身在行驶过程中如何保持车身平稳的控制策略进行研究。
分别通过仿真分析验证算法和控制策略的正确性。但是单纯的仿真不能证明研究结果的合理性和科学性,为了进一步验证上述算法在实际应用中的可行性。
本章将通过相应的道路试验进行验证在实际应用过程中控制算法对悬挂系统的优化效果,并采用均方根值的具体指标对优化效果进行量化处理。对车辆的平顺性进行评价,检验主动悬挂系统样车的性能并验证算法的准确性。
试验样车的组成
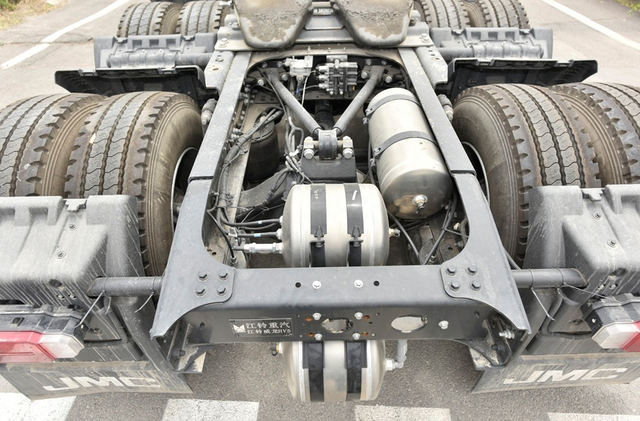
本文的试验样车是在徐工集团XCA60_E型起重机的基础上进行改装而成,可实现配重10吨,在实际的行驶过程中通过配重块来模拟车体负载。试验车主要由机械系统、液压系统和电控系统组成。
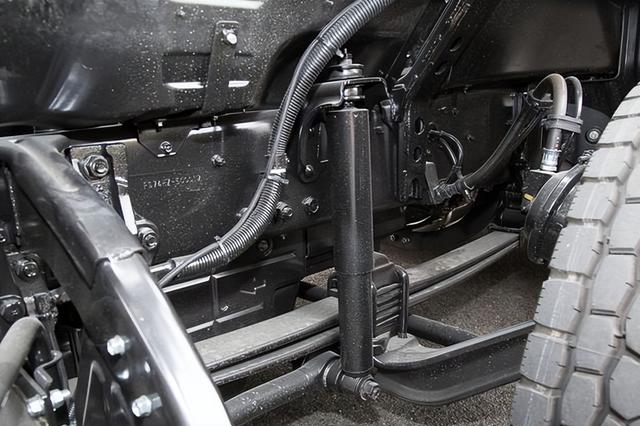
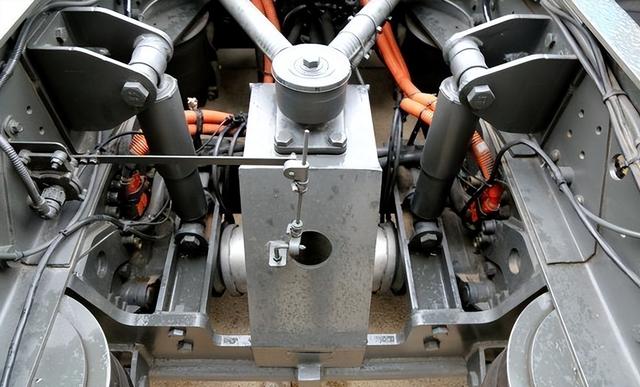
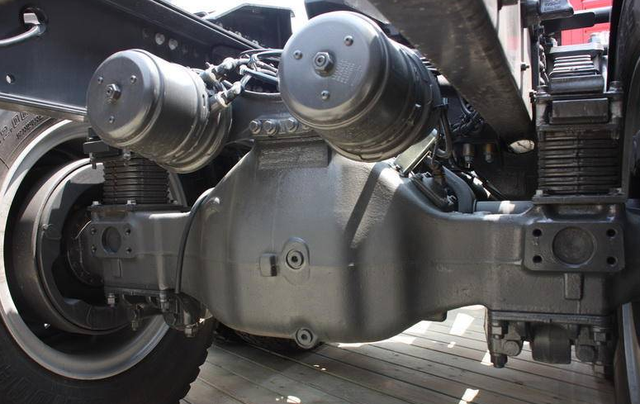
机械系统主要由车挂、底盘和悬挂系统构成,并起到承载车身的作用。液压系统通过安装非对称电液伺服阀控液压缸,并搭配液压控制回路,实现作动器的液压控制。

为方便试验样车在同一路面行驶时进行主动悬挂和被动悬挂的平顺性比较,在试验样车上增设主被动切换阀,实现主动、被动模式切换。
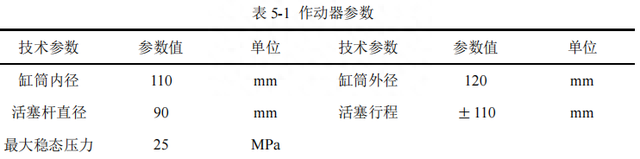
当试验样车在主动模式下行驶时,中央处理器通过控制电液伺服阀的电流来控制液压作动器伸缩。其中液压作动器为非对称液压缸,本文中忽略液压作动器的设计及选型,在表5-1中给出了作动器的具体参数。
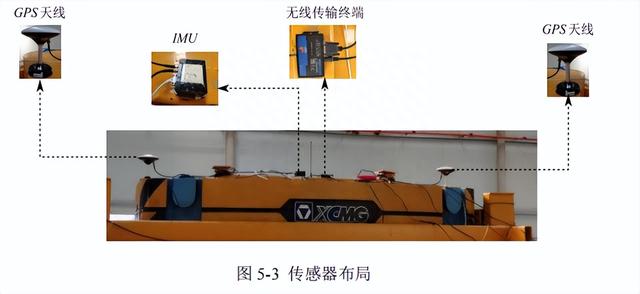
试验样车的测控系统试验样车的测控系统由测量系统和控制系统组成。惯性测量单元(IMU)、GPS以及悬挂作动器处的位移传感器、力传感器等部件组成测量系统作为车辆行驶过程中获取路面信息和车身姿态的渠道。
PC104中央处理器、电控单元、伺服控制器组等部件组成控制系统可实现对位姿信息的处理、解算、调控。惯性测量单元与车载GPS传感器都是安装在试验样车上的配重块平面上,且其惯性测量单元是与车载GPS传感器的安装位置位于同一条直线上,且均与三轴车辆的中轴线重合。
其中惯性测量单元和GPS主要是用来获取试验样车当前的位置和速度以及姿态角度信息。悬挂作动器处的位移传感器和力传感器分别用来测量悬挂动行程和悬挂处的驱动力。在样车运行过程中对传感器数据进行处理并按照设定控制方法完成对主动悬挂作动器的控制。
试验开始前,应对样车试验系统各部件的设备及通信连接进行故障检测,并对惯性传感器进行初始化校准。各传感器在试验样车上具体的安装位置,如图5-3所示。
PC104中央处理器接口中主要包含了模拟量输入输出通道、数字分量输入输出控制通道、通信接口以及总线端口。
其中,模拟量的输入信号通道主要用于实时采集系统液压作动器的相对位置、液压作动器大腔容积与系统小腔容积的相对压强;模拟量输出通道用于控制电液伺服阀的开口;数字量输出通道用于控制电磁换向阀门的自动通断以及信号指明灯开关的自动开闭,USB端口用于自动收集来自GPS卫星的信号;总线接口则用来传输各传感器的信息。

将信号采集系统获取的车体位姿信号通过总线接口传输到中央处理器,经过控制算法解算后得到各个悬架作动器的驱动力,实现对车体位姿的调控。图5-3为整车的控制流程图。
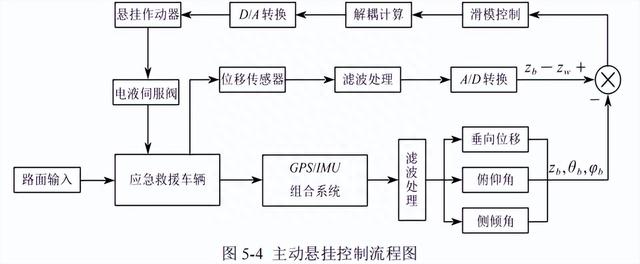
IMU/GPS组合导航系统的输出数据在滤波处理后得到车体位姿的信息,将这些信息作为悬挂控制系统的输入,根据理想车辆姿态数据和实际输入信息的差值,按照本文中的控制规则解算出维持车身位姿平稳所需的作动器驱动力。
通过D/A转换和电压转电流模块控制电液伺服阀的开口,控制作动器输入力的大小,使整车垂向、侧倾和俯仰三个方向上的运动跟踪参考轨迹。按照上述流程,带有主动悬挂系统的样车完成悬挂作动器的调节,降低试验样车面对路面冲击时产生的车辆振动,提高行驶平顺性。
道路试验
由于试验样车及场地条件限制,较难在试验场地搭建符合标准要求的C级路面,为了验证试验车辆在实际行驶过程中,控制策略对主动悬架系统车身位姿调整的有效性,在实验过程中选择了路况较差的土路为测试路线,并保证车辆足够的行驶空间。

由于本文只研究三轴车辆沿直线行驶的情况,忽略掉在行驶过程中转向机构对其造成的影响,在进行实车试验时应保持匀速直线行驶状态。

在20km/h的时速下,研究在本文算法下车辆在主、被动悬挂的姿态信息,在主、被动模式下应尽量保持车辆经过相同路段。记录车辆在行驶过程中的姿态信息,并采用均方根的形式进行具体量化。详细的道路情况如图5-5所示:
试验结果分析
通过上述实验方法,图5-6、图5-8以及图5-10表示在主、两种模式下输出的车身姿态信息,图5-7、图5-9以及图5-11表示在主、两种模式下输出的车身加速度姿态信息。通过对比三轴车辆在主、被动模式下车身姿态及其加速度在时域上的变化曲线。
由于两次作用于样车的路面激励相同,不同模式下的车身姿态变化趋势基本保持一致。但是主动模式下,基于滑模控制的主动悬挂相比于被动模式在车身位姿及其加速度方面有效抑制了车身振动,提高了车辆的平顺性。
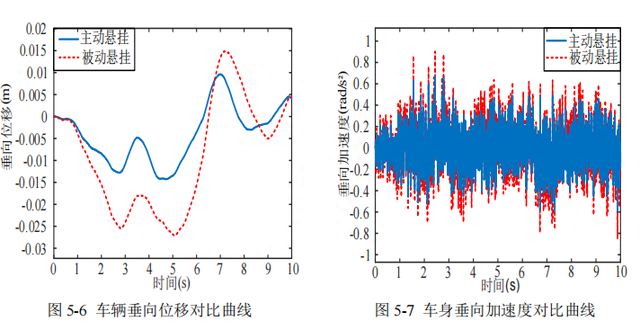
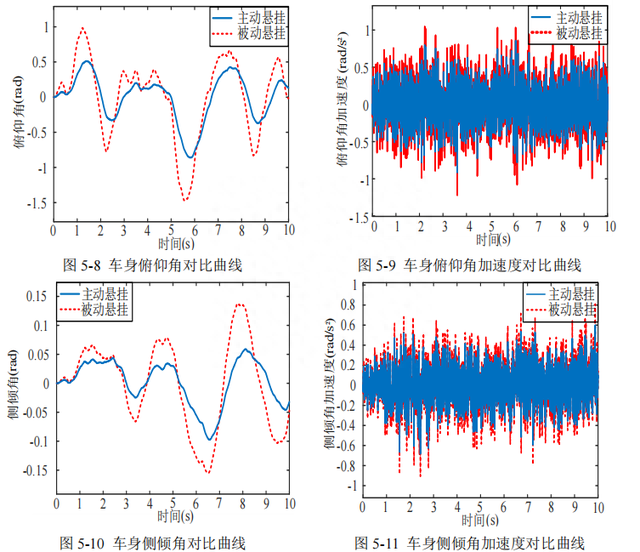
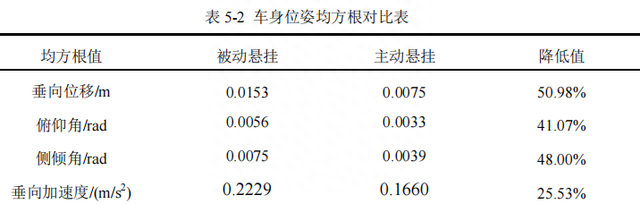
为了更明显对比主动悬挂和被动悬挂对行驶平顺性的改善,分别对车辆主动模式下和被动模式下采集的数据信息进行均方根值的计算。结果如表5-2所示,相比于被动悬挂车身垂向位移、俯仰角、侧倾角的均方根值分别降低了50.98%、41.07%、48.00%。
车身姿态对应的加速度均方根值指标分别降低了25.53%、24.91%、24.78%。计算结果表明,相较于被动模式采用本文主动悬挂控制策略的车身姿态有着明显的降低。
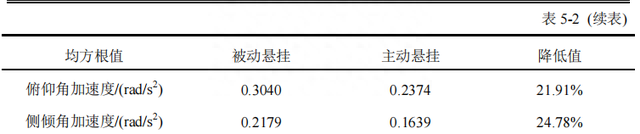
使用滑模控制策略设计的主动悬挂可以更有效准确地去抑制由于路面激励而产生的路面振动和冲击。相较于传统被动悬挂,主动悬挂系统车身的垂向、俯仰和侧倾三个方向的均方根值有明显的降低,提高了其平顺性。
总结
本章主要是对试验样车中测量系统和控制系统的组成、安装位置进行介绍,为了验证前文算法的有效性,选取路面起伏较大的土路为试验路面。试验车辆以相同时速在实验路面上直线行驶的情况下,进行主被动模式的切换。

实验完成后对车辆两种悬挂模式下的实验数据进行提取并进行具体的量化分析,结果表明在实际行驶过程中,主动悬挂对车身位姿有较好的控制作用,可以保持车身平稳。

针对整车动力学模型的搭建,只考虑了悬挂系统和轮胎的非线性,没有考虑三轴车辆在行驶中的不确定性因素和外界扰动的情况。在仿真过程中只考虑了单一等级下的路面,没有考虑不同路面等级下的连续行驶状况。
同时建立了复杂路面条件行驶的车体位姿变化模型。针对传统卡尔曼滤波对于未知量测噪声的不足,采用基于改进的自适应卡尔曼滤波,根据实际应用场景选用松耦合的导航系统。通过改进的自适应卡尔曼滤波器对系统中的量测噪声进行实时估计,有效提高车体位姿精度,避免在实际应用过程中的发散现象。
- 响应国家号召,蓝电补贴加倍!蓝电E5荣耀版补贴后8.98万起即可入手
- 购车好时机!以旧换新,万元补贴等你拿,蓝电E5荣耀版补贴后仅8.98万起!
- 蓝电补贴加倍!蓝电E5荣耀版限时补贴后8.98万,购车更划算!
- 响应国家政策!蓝电E5荣耀版补贴后仅8.98万起
- 蓝电E5荣耀版补贴后仅8.98万元起,以旧换新,立享万元补贴,购车更划算!
- 优惠来袭!以旧换新,万元购车补贴,蓝电E5荣耀版补贴后低至8.98万元起!
- 蓝电E5荣耀版:国家号召积极响应,补贴加倍,补贴后8.98万起不容错过!
- 想买启源Q05先别急着下单,蓝电E5荣耀版大七座来袭:更宽敞舒适!
- 家庭用车必备:大七座蓝电E5荣耀版更胜五座启源Q05
- 大七座蓝电E5荣耀版,家庭用车的明智之选,并非五座启源Q05
- 10万级油电对决,蓝电E5荣耀版对比长安CS75 PLUS:谁更受欢迎?
- 电比油强!选CS75 PLUS不如中型插混SUV蓝电E5荣耀版
-

响应国家号召,蓝电补贴加倍!蓝电E5荣耀版补贴后8.98万起即可入手
2015.12.16 -

购车好时机!以旧换新,万元补贴等你拿,蓝电E5荣耀版补贴后仅8.98万起!
2015.12.16 -

蓝电补贴加倍!蓝电E5荣耀版限时补贴后8.98万,购车更划算!
2015.12.16 -

响应国家政策!蓝电E5荣耀版补贴后仅8.98万起
2015.12.16